




























집게냐 손가락이냐 그것이 문제로다
손가락에 숨은 촉각의 비밀
아무리 업그레이드를 해도 로봇 손이 가진 한계는 존재합니다. 정해진 크기의 물건을 정해진 위치에서 정해진 힘으로 집어 옮기는 일은 완벽하게 할 수 있습니다. 하지만 물건의 크기나 형태, 재질과 상관없이 잡을 수 있는 만능 로봇 손을 만드는 것은 현재의 과학기술로도 거의 불가능한 일입니다. 하지만 그런 노력은 계속되고 있습니다. 로봇이 인간과 함께 살아가려면 결국 사람이 쓰기 편하도록 만든 물건들을 함께 쓸 수 있어야 하니까요.
- 글 | 전승민
대학교 4학년 때의 일입니다. 몇 가지 졸업 작품을 생각하다가 로봇팔 비슷한 것을 만든 적이 있습니다. 대강 설계도를 그린 다음 동네 공업사에 가서 여러 가지 부품을 만들어 왔습니다. 그 다음 에폭시 같은 접착제나 고무줄, 테이프 같은 것으로 부품을 얼기설기 엮어서 형태를 만들었지요. 4개의 관절에는 전기모터를 달았습니다. 네 가닥의 전선을 길게 연결해 모터마다 하나씩 전기스위치에 연결했습니다. 1번 스위치를 누르면 집게손, 2번을 누르면 손목이 움직이는 식입니다. 다 만든 로봇팔은 ‘징징~’ 소리를 내면서 비교적 잘 움직였습니다만, 끝에 붙여 둔 집게손은 물건을 집어 들지 못했습니다. 힘이 약해서 그런 것은 아니었습니다. 아주 가벼운 물건도 들지 못했으니까요.
저는 결국 가지고 있던 컴퓨터 통신용 프로그램을 조금 고쳐서 졸업작품으로 내는 쪽으로 바꿨습니다. 그 로봇팔은 방 한쪽 구석에 처박혔다가 몇 번의 이사와 함께 세상에서 사라지고 말았습니다.
만약 제가 로봇팔을 포기하지 않고 제대로 된 졸업작품으로 만들어내려면 어떻게 해야 했을까요. 먼저 네 개의 스위치를 대신할 전자회로를 만들어 집게손을 구부리는 속도, 물건을 집는 각도 같은 것을 정확하게 조절할 수 있도록 모터의 힘과 회전속도를 정밀하게 조종하려고 했겠지요. 이 과정에서 당연히 손가락으로 스위치를 누를 수는 없으니 컴퓨터로 프로그래밍을 해서 제어 프로그램을 만들어 보려고 했을겁니다.
만약 진짜 기계 기술자가 나선다면 이야기가 달라집니다. 부품을 더 정밀하게 가공하고 모터나 기어도 여러가지가 들어갈 겁니다. 또 제어 프로그램의 완성도도 계속 높여 나가야겠지요. 계속 업그레이드를 해 나가다 보면 로봇팔은 결국에는 공장에서 쓰는 작업용 로봇처럼 변할 겁니다. 조그만 부품도 척척 집어서 옮겨 놓는 정밀한 집게손이 달린 그런 기계 말입니다.
하지만 아무리 업그레이드를 해도 로봇 손이 가진 한계는 존재합니다. 정해진 크기의 물건을 정해진 위치에서 정해진 힘으로 집어 옮기는 일은 완벽하게 할 수 있습니다. 하지만 물건의 크기나 형태, 재질과 상관없이 잡을 수 있는 만능 로봇 손을 만드는 것은 현재의 과학기술로도 거의 불가능한 일입니다. 하지만 그런 노력은 계속되고 있습니다. 로봇이 인간과 함께 살아가려면 결국 사람이 쓰기 편하도록 만든 물건들을 함께 쓸 수 있어야 하니까요.
손가락에 숨은 촉각의 비밀
최근에는 사람처럼 두 팔, 두 다리가 달린 로봇이 종종 TV에 등장합니다. 이런 로봇들은 모두 사람과 비슷한 모양의 손을 가지고 있습니다. 마이크 같은 것을 들고 사회를 보는 로봇도 있기 때문에 대부분의 사람들은 ‘로봇이 손으로 물건을 잡는 것은 어렵지 않다’고 생각합니다. 하지만 이런 로봇의 손 기능은 굉장히 빈약합니다. 물건을 ‘잡고’ 있는 것이 아니라 손 관절 사이에 끼우고 있다고 봐야 합니다.
사람은 눈을 감고 있어도 어떤 물건을 만져보는 것만으로도 많은 정보를 순식간에 파악할 수 있습니다. 손끝의 감각 덕분이죠. 아주 잠시만 이곳저곳 만져 보면 물건의 재질, 온도, 경도(딱딱한 정도)를 순식간에 파악할 수 있고 크기와 형태까지 정확히 알 수 있습니다. 물건을 들어 올릴 때는 이렇게 얻은 정보를 최대한 활용합니다. 손가락을 벌리는 넓이를 적당히 조절하고 너무 세게 쥐어 물건이 망가지지 않도록 합니다. 더구나 사람은 물건을 눈으로 보는 것만으로도 많은 정보를 얻기 때문에 얇은 유리판이나 가느다란 샤프심도 아무렇지 않게 집어 듭니다. 로봇에게는 이런 일이 사실상 불가능합니다. 모양이야 비슷하게 만들 수 있지만 ‘촉각’과 ‘시각’이 턱없이 부족하죠. 이런 손가락을 제각각 움직이게 만들기도 어렵습니다. 결국 과학자들은 현실적인 대안을 찾기 시작합니다. 공업용 로봇에서 쓰는 ‘집게손’을 빌려오는 겁니다.
집게형 로봇 손이 유리한 이유
2010년 1월. 한국과학기술연구원(KIST) 유범재 박사 연구팀은 인간형 로봇 ‘마루Z’가 주인의 명령을 받아 토스트를 구워 가져다주는 기능을 선보인 적이 있습니다. ‘로봇이 가사노동을 할 수 있다’는 가능성을 제시해 크게 호평을 받았지요. 이때 마루Z는 다섯 손가락이 달린 손이 아니라 집게를 이용해 쟁반과 식빵 등을 집어 옮겼습니다.
물건을 집게로 ‘끼워서’ 잡는 이런 방법을 로봇 공학자들은 ‘그립퍼 Gripper’ 방식이라고 부릅니다. 실용적이고, 구조가 단순해서 제어하기 쉽습니다. 하지만 원래 공장에서 쓰는 방식이다 보니 그 단점도 그대로 가지고 있습니다. 집게의 크기와 모양에 따라 잘 잡을 수 있는 물건과 그렇지 못한 물건이 나눠지는 겁니다. 반도체 공장에서 쓰던 로봇팔을 타이어 공장에서 쓸 수 없는 것과 마찬가지입니다.
한국과학기술연구원(KIST)이 만든 인간형 로봇 마루Z의 손 :
국내에서 인간형 로봇에게 집게형 손을 붙인 것은 마루Z가 처음이다.
‘그리퍼(집게)’ 방식의 단순한 구조지만 집게 밑에 작은 손가락을 하나 더 달아 주방기구 스위치를 조작할 수 있게 만들었다.
집게의 길이는 7.5cm로 쟁반이나 음식바구니, 컵 등을 잡을 수 있다.
마루Z도 이 집게손으로는 토스트 굽기 이외에 다른 일을 하기 어렵습니다. 결국 집게형 손으로 로봇을 만들면 여러 가지 일을 하지 못한다는 결론에 도달합니다. 가사를 돕는 로봇을 만들려면 서빙, 청소, 세탁, 요리 등을 하는 로봇을 모두 따로 만들어야 합니다. 아니면 필요할 때마다 손을 갈아 끼워주어야겠지요.
마루Z 이외에 다른 인간형 로봇은 어떨까요. 손의 기능보다는 ‘모양’에 치중하고 있습니다. 어떤 일을 하기 보다는 ‘손도 움직인다’는 사실을 보여 주기 위한 상징적인 의미가 더 큽니다. 이런 방법은 ‘의인화’라는 뜻의 ‘앤트로포모르픽 Anthropomorphic’ 방식이라고 부르는데, 한국의 대표적인 두발로봇 ‘휴보’도 마찬가지입니다.
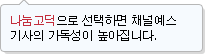
휴보2의 손 : 휴보2의 손은 사람의 손동작을 흉내 내는 데 주력하는
‘앤트로포모르픽(의인화)’ 방식으로 만들어졌다. 와이어로 힘줄을 대신해 손가락 5개가 제각각 움직인다.
둥근 공이나 막대기, 기계부품 등 다양한 물건을 미끄러뜨리지 않고 움켜잡을 수 있다.
하지만 2009년 말 발표된 ‘휴보2’는 조금 다릅니다. 의인화 방식을 쓰긴 했지만 기능성도 포기하지 않았습니다. 와이어로 힘줄을 만들어 손가락도 가늘고, 다섯 개의 손가락이 따로따로 구부러집니다. 또 손가락 끝에 무언가 걸리면 그 손가락 하나만 구부리는 것을 멈추는 기능도 있습니다. 물건의 모양에 맞춰 손을 ‘쥘 수’ 있어서 다른 두발로봇보다는 기능성이 훨씬 좋은 편입니다. 이 로봇 손은 휴보팀이 독자적으로 개발했습니다. 당시에 KAIST 휴머노이드로봇연구센터는 로봇의 걸음걸이나 시스템 안정성을 주로 연구했기 때문에 손가락에는 신경을 쓰기 어려웠을 텐데, 정말로 세밀한 곳까지 연구하고 있다는 생각을 했습니다.
만들기 어려운 손가락형
그렇다면 로봇은 정말로 인간과 똑같은 손을 가질 수 없는 걸까요. 아직은 어렵지만 가능하다고 보는 사람들은 있습니다. ‘사람과 똑같은 로봇손’만 전문으로 연구하는 사람들도 있으니까요. ‘덱스트러스 Dexterous’ 방식이라고 하는데 말이 어려우니까 이 글에선 편의상 손가락형이라고 부르겠습니다. 손가락형 로봇손은 사람의 손동작을 흉내 낼 수 있도록 네 개, 또는 다섯 개의 손가락이 붙어 있고 손가락마다 3개 이상의 관절이 붙어 있습니다. 보기에도 사람의 손과 굉장히 비슷해 보입니다. 국내에서 이 방식으로 인간형 손을 개발하고 있는 곳으로는 한국생산기술연구원과 성균관대학의 최혁렬 교수팀이 있습니다. KIST도 최 교수팀 연구에 협력하고 있습니다. 손가락형 로봇 손의 최대 단점은 제어하기가 까다롭다는 점입니다. 손가락이 다섯 개면 관절은 15개가 넘습니다. 공업용 로봇 4~5대에 해당하지요. 이런 로봇들을 조그만 책상 위에 모아두고 서로 협력하면서 일을 하게 만든다고 생각해 보십시오. 거기다가 사람의 촉각을 대신하기 위해 물건의 딱딱한 정도를 느끼는 힘 센서나 촉각 센서도 붙여 주어야 합니다. 그러고 나면 센서에서 들어오는 신호를 손가락의 움직임과 유기적으로 연결되도록 동작 패턴을 만들어 주어야 합니다.
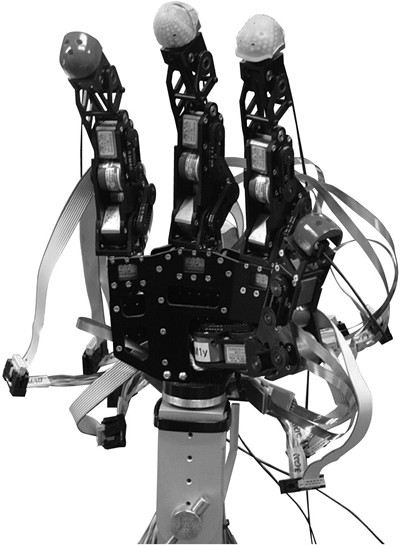
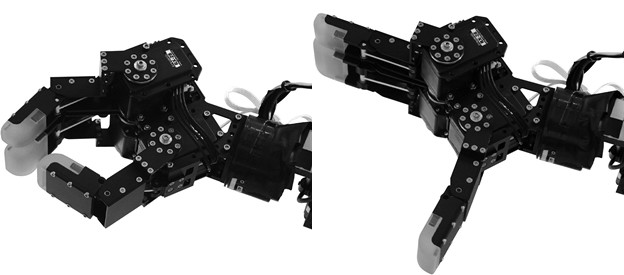
덱스트러스 방식 로봇손 :
성균관대 최혁렬 교수 연구팀과 KIST가 공동으로 개발하고 있는 덱스트러스(손가락 형) 방식의 로봇손.
아직 완성되진 않았지만 국내에서 가장 성능이 뛰어난 로봇손이 될 것으로 보인다.
마루Z 개발에 참여한 바 있는 오용환 KIST 책임연구원은 “로봇팔 하나를 만드는 것보다 손가락 하나를 제대로 만드는 게 더 어렵다”면서 “손을 전부 제대로 만드는 건 상상하기 어려운 작업” 이라고 했습니다. 손가락형 로봇손을 개발하고 있는 백문홍 생기원 로봇기술연구부 수석연구원은 “로봇 기술의 시작과 끝”이라고까지 설명했습니다.
손가락형 로봇 손을 만드는 기술은 독일이나 일본이 가장 앞서 있습니다. 독일 DLR 로봇메카트로닉스연구소가 만든 ‘DLR-HIT 핸드’ 시리즈가 가장 정밀한 것으로 알려져 있습니다. 개당 2억 원 정도의 비싼 가격에 연구용 장비로 팔기도 합니다. 이 밖에 일본 와세다대 연구팀이 개발한 ‘트웬디원 Twendy One’도 유명합니다. NASA 팀이 개발한, 국제우주정거장에서 사람 대신 각종 기기를 조작하는 작업용 우주로봇인 ‘로보너트2’의 손 기능도 대단히 뛰어나다고 인정받고 있습니다.
하지만 이렇게 정밀하고 좋은 로봇손도 사람 손에 비하면 초라할 뿐입니다. 앞으로 ‘수십 년은 더 연구해야 할 과제’라는 사람도 많습니다. 워낙 어려운 일이라서 ‘이렇게 하면서까지 사람 흉내를 낼 필요가 있나’하는 생각이 들 때가 있다고 합니다. 개발 방식이야 어떻든 로봇의 손은 결국 사람을 닮아 가지 않을까 생각합니다. 어떤 물건이든 자유롭게 잡을 수 있는 기계. 가장 좋은 견본은 바로 사람의 손일 테니까요.
[관련 기사]
-로봇이 사람을 닮아야 하는 이유
-두 발로 걷는 로봇을 만드는 방법
-갑각류가 좋을까, 포유류가 좋을까
-로봇이 인간을 구하는 세상, 멀지 않았다 - 데니스 홍
-과학을 뒤흔든 젊은 천재 10인, 데니스 홍 “나는 천재가 아니다”


- 휴보이즘: 나는 대한민국 로봇 휴보다 전승민 저 | MID 엠아이디
미국 헐리우드 영화 「로보캅」 이나 「아이언맨」 이 판타지이고, 일본 혼다자동차의 ‘아시모’가 로봇 산업의 현재라면, 대한민국의 대표 로봇 ‘휴보’의 위치는 어디쯤이 될까. 대부분의 사람들은 “휴보는 이미 철지난 구제품 아니냐”며, 아직도 개발하고 있다는 이야기를 하면 깜짝 놀라기도 하고, 로봇 산업에 대해 조금 아는 사람들일지라도 휴보는 “역대 정부의 전시형 사업”이라며 비난하는 사람도 있다. 과연 그럴까?

‘대한민국 No.1 문화웹진’ 예스24 채널예스











- [기사] 갑각류가 좋을까, 포유류가 좋을까
- [기사] 두 발로 걷는 로봇을 만드는 방법
- [기사] 로봇이 사람을 닮아야 하는 이유
-
글 | 전승민
‘현실세계에 도움되는 기술이 진짜 과학’이라는 모토로 국내 과학기술계 현장을 두 발로 뛰고 있는 과학전문기자. 현재 과학전문 언론사 「동아사이언스」 소속으로 ‘대덕연구 개발특구(대덕연구단지 일원)’를 전담해 취재하고 있다. 의료과학「 로봇「 국방과학 등 실용성 높은 과학기술에 관심이 많다. 대덕연구단지 인터넷 신문 「대덕넷」 취재기자로 근무했다. 「동아일보」 신문 지면에 과학 기사를 쓰고 있으며「 인터넷 과학포털 「동아 사이언스」 일간뉴스 담당기자로 근무하고 있다. 월간 과학전문지 「과학동아」에도 정기적으로 기사를 게재하고 있다.
-
-
휴보이즘
<전승민> 저13,500원(10%
 + 5%
+ 5% )
)
미국 헐리우드 영화 「로보캅」이나 「아이언맨」이 판타지이고, 일본 혼다자동차의 ‘아시모’가 로봇 산업의 현재라면, 대한민국의 대표 로봇 ‘휴보’의 위치는 어디쯤이 될까. 대부분의 사람들은 “휴보는 이미 철지난 구제품 아니냐”며, 아직도 개발하고 있다는 이야기를 하면 깜짝 놀라기도 하고, 로봇 산업에 대해 조금 아..
-
 + 5%
+ 5% )
)









PYCHYESWEB02